Multi-Agent Path Finding (MAPF)
Contact: Students: Bharath Muppasani, Ritirupa Dey, Risha Patel; Faculty: Biplav Srivastava, Vignesh Narayanan
Key Idea
- HI-MAPF: resource-efficient MAPF through local agent planning and lightweight, conflict-triggered coordination that reduces inter-agent information sharing.
- maPO: an ontology for representing MAPF planner traces, conflicts, alerts, and replanning behavior as queryable knowledge graphs.
- OMEGA: an ontology-driven tool that uses maPO to generate human-readable explanations for MAPF planner behavior.
HI-MAPF: Resource-Efficient Multi-Agent Deployment
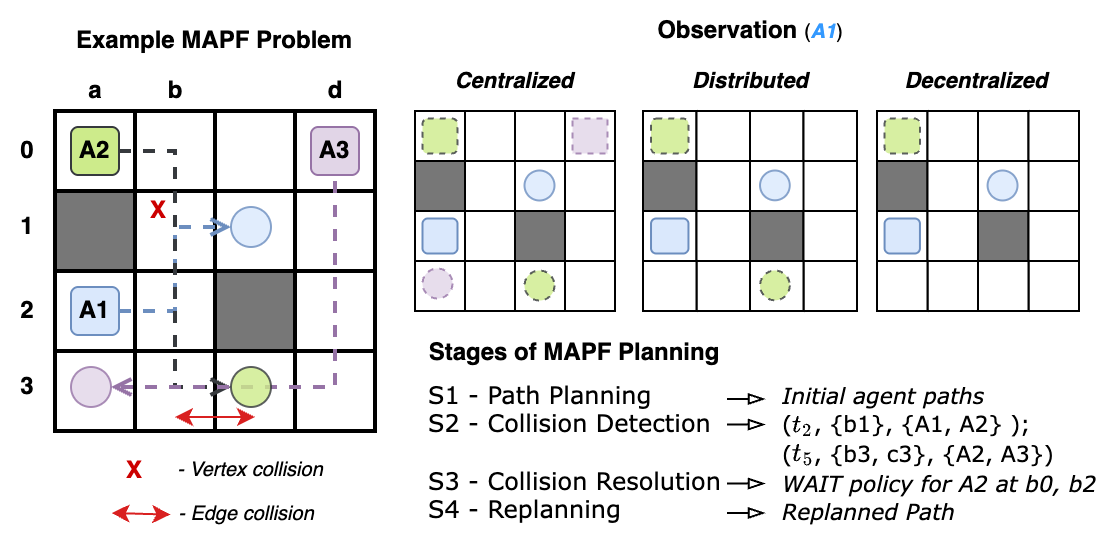
Traditional MAPF approaches often assume centralized search with global state, high-bandwidth communication, or learning-based policies that require sophisticated onboard perception and frequent inter-agent messages. HI-MAPF formulates this bottleneck as information-centric MAPF (I-MAPF). Each agent plans from local information, while a coordinator monitors for likely vertex or edge conflicts and sends minimal alerts only when replanning is needed. Escalation proceeds through lightweight repair strategies such as yielding, static replanning, dynamic replanning, and bounded joint planning for hard residual conflicts.
Experimental Results
HI-MAPF was evaluated on standard MAPF benchmarks with 8 to 128 agents against search-based and learning-based baselines. It achieved a 2x to 510x reduction in information sharing while maintaining high success rates. In hardware validation with five TurtleBot4 robots on a 6×6 grid, HI-MAPF achieved 100% success with 199 IU, compared with 42,413 IU for SCRIMP in the same setup.

Physical deployment on five TurtleBot4 robots.
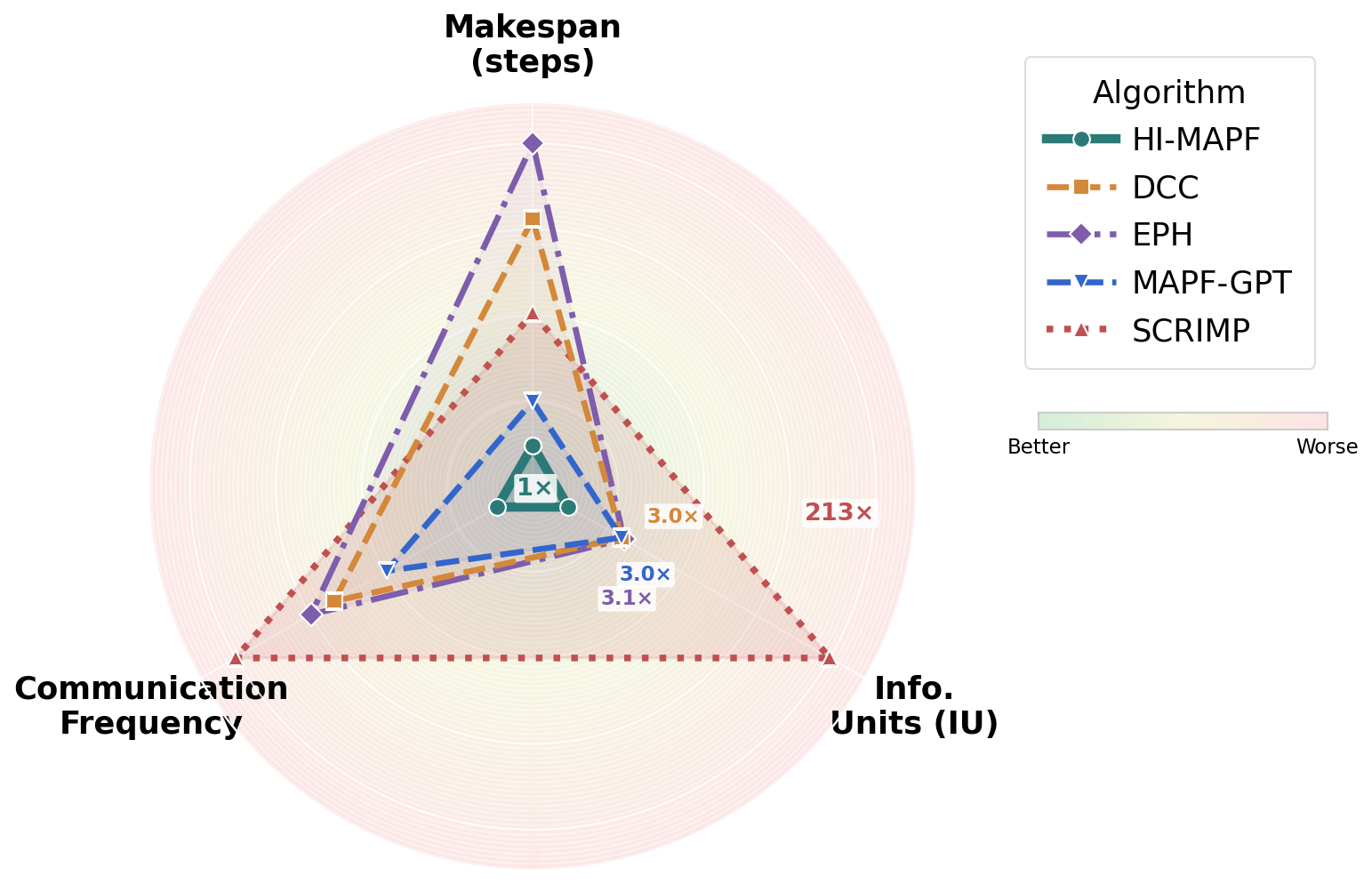
Hardware comparison across makespan, information units, and communication frequency.
Representative Publication
Related Explainable MAPF Work
In parallel with the resource-efficient deployment work, we also study ontology-driven explanation for MAPF. The Multi-Agent Planning Ontology (maPO) represents planner traces, conflicts, alerts, and replanning behavior as a queryable knowledge graph, enabling human-readable explanations for why agents waited, replanned, or avoided specific regions.
Representative Publications
-
maPO: An Ontology for Multi-Agent Path Finding and Its Usage for Explaining Planner Behaviour
Authors: Bharath Muppasani, Ritirupa Dey, Biplav Srivastava, Vignesh Narayanan
[Paper] [Website] -
OMEGA: An Ontology-Driven Tool for Explaining Multi-Agent Path Finding
Authors: Bharath Muppasani, Ritirupa Dey, Biplav Srivastava, Vignesh Narayanan
Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence - Demonstrations Track (AAAI-26 Demo)
[Paper] [Video] [Poster] [Website]