Building a Planning Ontology to Represent and Exploit Planning Knowledge and Its Applications
Discover Data 3, 55 (2025). DOI: 10.1007/s44248-025-00093-9
A Tutorial on Knowledge Representation and Explainable Planning
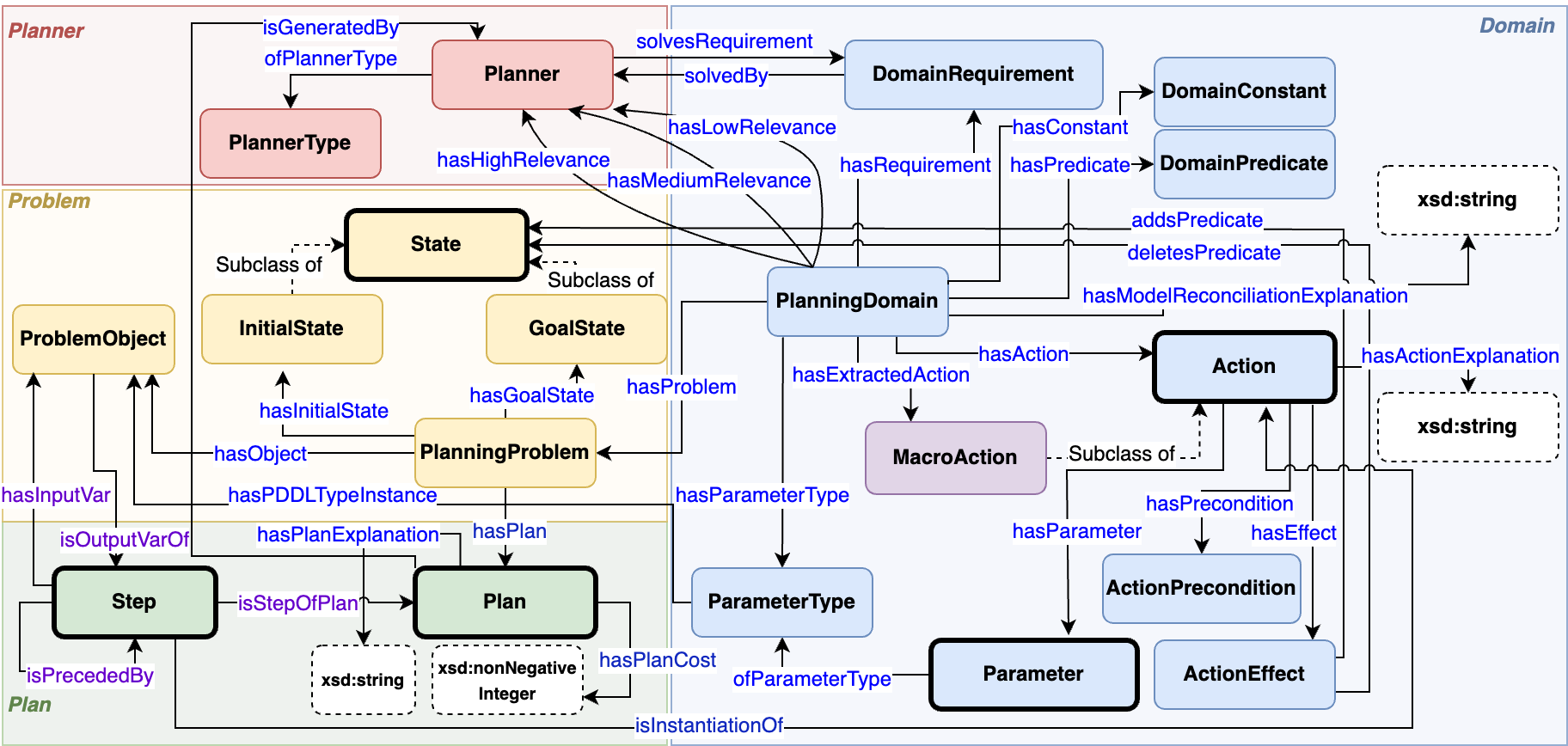
Automated planning offers many planners and domains, but the performance data and domain models sit in static, disconnected files such as IPC reports and PDDL. In this tutorial you model the core concepts — PlanningDomain, Planner, Plan, Action, Step — as an OWL ontology, populate a knowledge graph from public datasets, and query it with SPARQL as an "ask-me-anything" layer over planning knowledge. We then extend it to multi-agent path finding (maPO) for explainable planner behaviour.
Rank planners for a domain by required features and past IPC performance — e.g. "which planner has the highest relevance for blocksworld?"
Query a plan's ordered steps and their explanations from the graph, then compose a natural-language narrative.
From the motivation and PDDL structure, to building and exploiting the ontology, the interactive tool, and the multi-agent extension.
Automated planning, why PDDL is structured, and the case for an ontology.
Scope, competency questions, the workflow, and two use cases — selection & explanation.
PDDL → knowledge graph → SPARQL, live inside the Planning.Domains editor.
Explainable MAPF — schema, provenance, the OMEGA dashboard & evaluation.
Each notebook opens in Google Colab with no local setup — the first cell installs dependencies and fetches the sample data. A Core path covers the essentials; optional Go deeper cells add SPARQL authoring and ontology extension.
Load the prebuilt KG and answer a planner-selection and an explanation question via helpers — no SPARQL required.
Load the ontology from the PURL with RDFLib, explore the schema & competency questions, ingest PDDL to populate a KG, run sample SPARQL.
Rank planners for blocksworld via SPARQL over a prebuilt IPC KG; optionally run a PDDL planner and write fresh results back.
Retrieve a plan's ordered steps and their explanations from the KG and assemble a template-based narrative.



AI Institute of South Carolina (AIISC) · University of South Carolina
Discover Data 3, 55 (2025). DOI: 10.1007/s44248-025-00093-9
AAAI Spring Symposium on Machine Learning and Knowledge Engineering for Knowledge-Grounded Semantic Agents (AAAI-MAKE 2026).
Proceedings of the Thirty-Ninth AAAI Conference on Artificial Intelligence, Demonstrations Track, Singapore, January 2026. DOI: 10.1609/aaai.v40i48.42367
@article{muppasani2025planning,
title = {Building a planning ontology to represent and exploit planning knowledge and its applications},
author = {Muppasani, Bharath and Gupta, Nitin and Pallagani, Vishal and Srivastava, Biplav and Mutharaju, Raghava and Huhns, Michael N. and Narayanan, Vignesh},
journal = {Discover Data},
year = {2025},
doi = {10.1007/s44248-025-00093-9}
}