Why a Multi-Agent Planning Ontology?
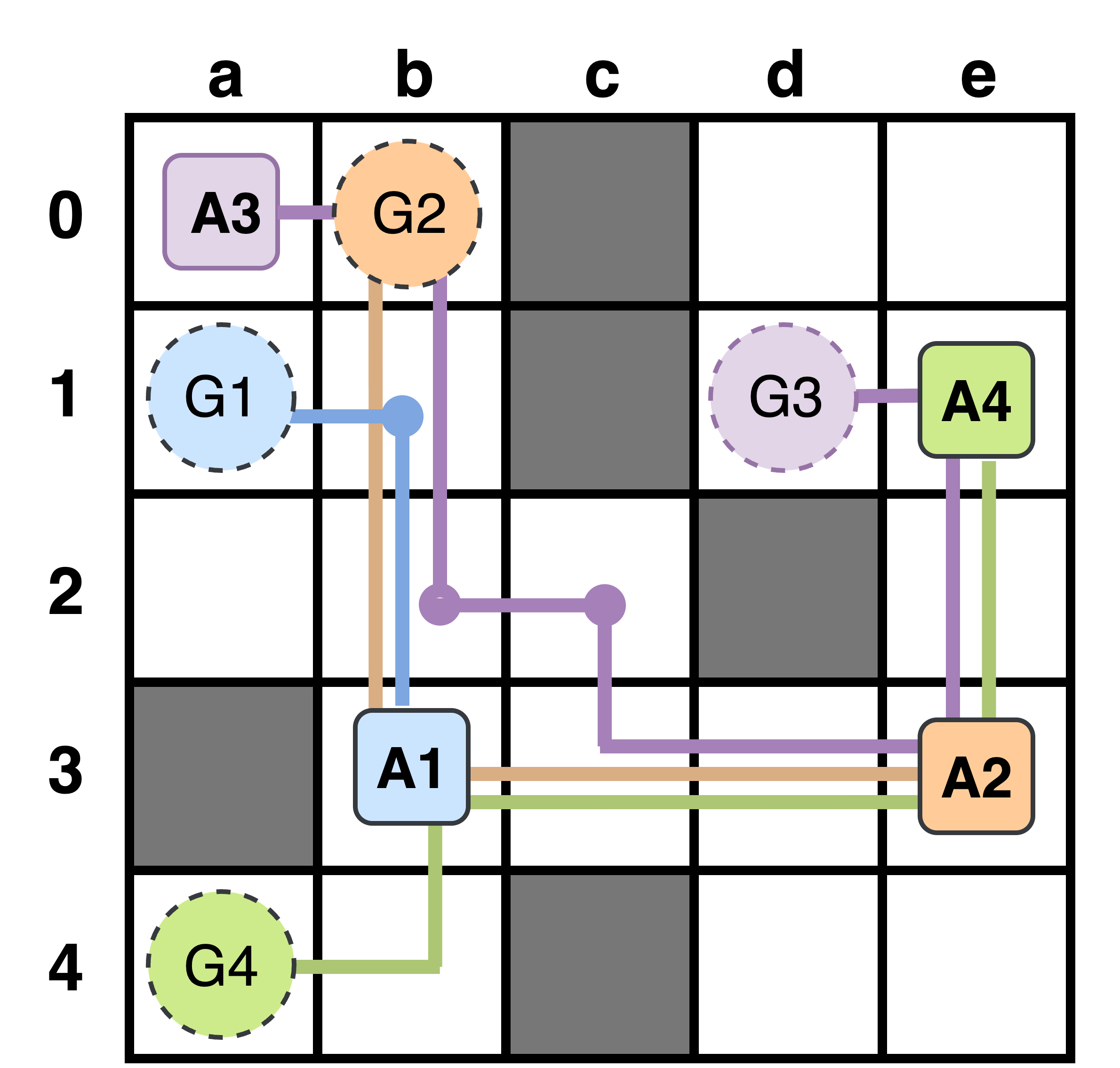
Multi-Agent Path Finding (MAPF)Plan collision-free paths for many agents on a shared graph — core to robotics & logistics.
Powerful but opaqueSolvers (CBS / ICBS, PIBT, RL / PRIMAL, MAPF-GPT) expose little about why decisions are made.
Explanations are requiredSafety-critical & regulatory settings demand transparent, human-readable answers.
Prior work is fragmentedVisual segmentation, ASP why / why-not, taxonomies — with no unified, queryable model.
maPO turns raw MAPF traces into a queryable knowledge graph for on-demand explanations — planner-agnostic.